Presentation at Department meeting February 18th 2021#
Analyzing motion in cardiac MPS data#
human induced Pluripotent Stem Cells (hiPSC) can be used in personalized drug screening#
Translation of Human-Induced Pluripotent Stem Cells Nazish Sayed, Chun Liu, Joseph C. Wu Journal of the American College of Cardiology May 2016, 67 (18) 2161-2176
MicroPhysiological Systems (MPS) mimics the in vitro conditions#
Tveito, A., Jæger, K.H., Huebsch, N., Charrez, B., Edwards, A.G., Wall, S. and Healy, K.E., 2018. Inversion and computational maturation of drug response using human stem cell derived cardiomyocytes in microphysiological systems. Scientific reports, 8(1), p.17626.
We want to quantifiy the motion of the cells in the chip. Why?
Contractile motion is an important biomarker
Several drugs alter the contractile properties and this is something we want to measure.
Provides data for parameterizing mechancal models of IPS cells.
Warning - There will be some code in this presentation 🤓
import mps
import numpy as np
import matplotlib.pyplot as plt
from pathlib import Path
path = Path("/Users/henriknf/local/src/mps_motion/demo/PointH4A_ChannelBF_VC_Seq0018.nd2")
data = mps.MPS(path)
video = Path("brightfield.mp4")
mps.utils.frames2mp4(data.frames.T, video, framerate=data.framerate)
from IPython.display import Video
Video(video, width=800, html_attributes="controls loop")
What type of data do we have?#
print("width, height, num_timepoints = ", data.frames.shape)
print(data.info)
Can we say something about how much a pixel moved from frame \(i\) to frame \(j\) ?#
%matplotlib inline
import matplotlib.pyplot as plt
fig, ax = plt.subplots(1, 2, figsize=(12, 12))
frame0 = data.frames[400:650, 350:700, 0]
frame70 = data.frames[400:650, 350:700, 70]
ax[0].imshow(frame0)
ax[0].set_title("Frame 0")
ax[1].imshow(frame70)
ax[1].set_title("Frame 70")
for axi in ax:
axi.grid()
plt.show()
plt.imshow(frame70 - frame0)
Block matching#
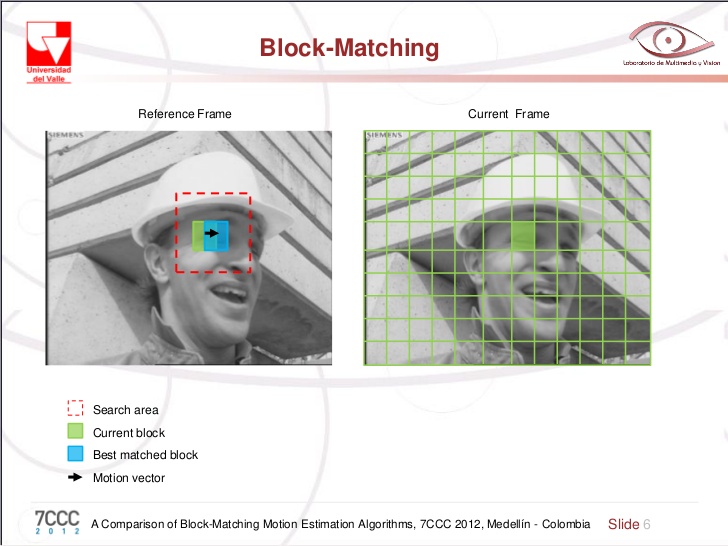
Divide images into macro blocks and decide on size of search area
For each block:
For each location in the search area:
Compute a similarity (mean square error)
Find the block inside the search area with the best
similarity measure and collect the motion vector
import matplotlib as mpl
x_start = 80
dx = 8
y_start = 80
dy = 8
reference_block = frame0[x_start:x_start + dx, y_start:y_start + dy]
search_x = search_y = 10
fig, ax = plt.subplots(1, 2, figsize=(12, 6))
ax[0].imshow(frame0)
search = mpl.patches.Rectangle(
(y_start - search_y, x_start-search_x),
dy + 2 * search_y, dx + 2 * search_x, facecolor="magenta",
alpha=0.2,
)
ax[0].add_patch(search)
block = mpl.patches.Rectangle(
(y_start, x_start), dy, dx, facecolor="red",
alpha=0.8,
)
ax[0].add_patch(block)
ax[1].imshow(reference_block)
import numpy as np
min_err = np.inf
best_block = None
u = None
v = None
for i, xi in enumerate(range(x_start - search_x, x_start + dx + search_x)):
for j, yj in enumerate(range(y_start - search_y, y_start + dy + search_y)):
current_block = frame70[xi:xi+dx, yj:yj+dy]
err = np.sum(np.abs(reference_block - current_block))
if err < min_err:
best_block = current_block
min_err = err
u = xi - x_start
v = yj - y_start
print(f"(u, v) = ({u}, {v})")
fig, ax = plt.subplots(1, 2)
ax[0].imshow(reference_block)
ax[1].imshow(best_block)
plt.show()
Assumptions#
Objects are only translated (not deformed)
No change in illumination or noise
Translations are small (within search region)
from mps_motion.block_matching import flow
block_motion = flow(frame0, frame70, block_size=3, max_block_movement=18, filter_kernel_size=5)
# Plot
vmin = -10
vmax = 10
fig, ax = plt.subplots(1, 3, figsize=(12, 8), sharex=True, sharey=True)
ax[0].imshow(block_motion[:, :, 0], vmin=vmin, vmax=vmax)
ax[1].imshow(block_motion[:, :, 1], vmin=vmin, vmax=vmax)
im = ax[2].imshow(np.linalg.norm(block_motion, axis=2), vmin=vmin, vmax=vmax)
for axi, title in zip(ax, ["X", "Y", "Norm"]):
axi.set_title(title)
cbar = fig.colorbar(im, ax=ax.ravel().tolist(), orientation='horizontal')
cbar.set_label("Pixel displacement")
plt.show()
times = {}
from mps_motion.block_matching import flow, filter_vectors
times["block matching"] = %timeit -o flow(frame0, frame70, block_size=9, max_block_movement=18, filter_kernel_size=0)
The optical flow equation#
Let \(I(x, y, t)\) denote the image sequence at position \((x, y)\) and time \(t\).
Assume that at some later time \(t + \Delta t\) the pixel at \((x, y)\) has moved to \((x + \Delta x, y + \Delta y)\).
Divide by \(\Delta t\) and let \(\Delta t \rightarrow 0\) gives us the optical flow equation
\(V_x\) and \(V_y\) are unknown. We need one more equation!
Image gradient#
I_x, I_y = np.gradient(frame0)
fig, ax = plt.subplots(1, 2, figsize=(10, 8))
ax[0].imshow(I_x)
ax[0].set_title("$I_x$")
ax[1].imshow(I_y)
ax[1].set_title("$I_y$")
plt.show()
The Lucas–Kanade method#
Assumption: Flow is essentially constant in a local neighbourhood of the pixel under consideration
Consider a pixel \((x, y)\) and select a \(5 \times 5\) window around this pixel (i.e 25 pixels).
or $\( A v = b \)$
solve least square problem $\( A^T A v = A^Tb\)$
from mps_motion.lucas_kanade import flow
lk_motion = flow(frame0, frame70, step=2, winSize=(15, 15))
# Plot
vmin = -10
vmax = 10
fig, ax = plt.subplots(1, 3, figsize=(12, 8), sharex=True, sharey=True)
ax[0].imshow(lk_motion[:, :, 0], vmin=vmin, vmax=vmax)
ax[1].imshow(lk_motion[:, :, 1], vmin=vmin, vmax=vmax)
im = ax[2].imshow(np.linalg.norm(lk_motion, axis=2), vmin=vmin, vmax=vmax)
for axi, title in zip(ax, ["X", "Y", "Norm"]):
axi.set_title(title)
cbar = fig.colorbar(im, ax=ax.ravel().tolist(), orientation='horizontal')
cbar.set_label("Pixel displacement")
plt.show()
How about performance?#
from mps_motion.lucas_kanade import flow
times["lucas kanade"] = %timeit -o flow(frame0, frame70, step=5, winSize=(15, 15), interpolate=False)
Dense optical flow methods#
Farnebäck’s method#
Farnebäck, G. (2003, June). Two-frame motion estimation based on polynomial expansion. In Scandinavian conference on Image analysis (pp. 363-370). Springer, Berlin, Heidelberg.
Assumption: image can locally approximated by a quadratic polynomial
Let \(\mathbf{x} = (x \; y)\) be a pixel coordinate, then we assumate that the reference image can be represented as
At a later time \(\mathbf{x}\) has moved to \(\mathbf{x} - \mathbf{d}\) so we can write the current image as
In practice we let \(A(\mathbf{x}) = \frac{1}{2}(A_1(\mathbf{x}) + A_2(\mathbf{x)})\), perform a polynomial expansion of the two images, and solve the least square problem
from mps_motion.farneback import flow
farneback_motion = flow(frame0, frame70)
# Plot
vmin = -10
vmax = 10
fig, ax = plt.subplots(1, 3, figsize=(12, 8), sharex=True, sharey=True)
ax[0].imshow(farneback_motion[:, :, 0], vmin=vmin, vmax=vmax)
ax[1].imshow(farneback_motion[:, :, 1], vmin=vmin, vmax=vmax)
im = ax[2].imshow(np.linalg.norm(farneback_motion, axis=2), vmin=vmin, vmax=vmax)
for axi, title in zip(ax, ["X", "Y", "Norm"]):
axi.set_title(title)
cbar = fig.colorbar(im, ax=ax.ravel().tolist(), orientation='horizontal')
cbar.set_label("Pixel displacement")
plt.show()
from mps_motion.farneback import flow
times["farneback"] = %timeit -o flow(frame0, frame70)
Dual TV-L 1#
ZACH, Christopher; POCK, Thomas; BISCHOF, Horst. A duality based approach for realtime tv-l 1 optical flow. In: Joint pattern recognition symposium. Springer, Berlin, Heidelberg, 2007. p. 214-223.
Variational approach which minimizes some functional subject to the optical flow constraint.
from mps_motion.dualtvl10 import flow
dualtvl1_motion = flow(frame0, frame70)
# Plot
vmin = -10
vmax = 10
fig, ax = plt.subplots(1, 3, figsize=(12, 8), sharex=True, sharey=True)
ax[0].imshow(dualtvl1_motion[:, :, 0], vmin=vmin, vmax=vmax)
ax[1].imshow(dualtvl1_motion[:, :, 1], vmin=vmin, vmax=vmax)
im = ax[2].imshow(np.linalg.norm(dualtvl1_motion, axis=2), vmin=vmin, vmax=vmax)
for axi, title in zip(ax, ["X", "Y", "Norm"]):
axi.set_title(title)
cbar = fig.colorbar(im, ax=ax.ravel().tolist(), orientation='horizontal')
cbar.set_label("Pixel displacement")
plt.show()
from mps_motion.dualtvl10 import flow
times["dualtvl1"] = %timeit -o flow(frame0, frame70)
Comparison#
| Type\Performance || Slow | Fast | |———————–||—————–|————–| | Sparse || Block matching | Lucas Kanade | | Dense || Dual TV-L 1 | Farnebäck |
vmin = -10
vmax = 10
import cv2
fig, ax = plt.subplots(4, 3, figsize=(12, 8), sharex=True, sharey=True)
ax[0, 0].imshow(cv2.resize(block_motion[:, :, 0], tuple(reversed(frame0.shape))), vmin=vmin, vmax=vmax)
ax[0, 1].imshow(cv2.resize(block_motion[:, :, 1], tuple(reversed(frame0.shape))), vmin=vmin, vmax=vmax)
ax[0, 2].imshow(cv2.resize(np.linalg.norm(block_motion, axis=2), tuple(reversed(frame0.shape))), vmin=vmin, vmax=vmax)
ax[0, 0].set_ylabel("Block matching")
ax[1, 0].imshow(lk_motion[:, :, 0], vmin=vmin, vmax=vmax)
ax[1, 1].imshow(lk_motion[:, :, 1], vmin=vmin, vmax=vmax)
ax[1, 2].imshow(np.linalg.norm(lk_motion, axis=2), vmin=vmin, vmax=vmax)
ax[1, 0].set_ylabel("Lucas Kanade")
ax[2, 0].imshow(farneback_motion[:, :, 0], vmin=vmin, vmax=vmax)
ax[2, 1].imshow(farneback_motion[:, :, 1], vmin=vmin, vmax=vmax)
ax[2, 2].imshow(np.linalg.norm(farneback_motion, axis=2), vmin=vmin, vmax=vmax)
ax[2, 0].set_ylabel("Farneback")
ax[3, 0].imshow(dualtvl1_motion[:, :, 0], vmin=vmin, vmax=vmax)
ax[3, 1].imshow(dualtvl1_motion[:, :, 1], vmin=vmin, vmax=vmax)
im = ax[3, 2].imshow(np.linalg.norm(dualtvl1_motion, axis=2), vmin=vmin, vmax=vmax)
ax[3, 0].set_ylabel("Dual TV-L 1")
for i, title in enumerate(["X", "Y", "Norm"]):
ax[0, i].set_title(title)
cbar = fig.colorbar(im, ax=ax.ravel().tolist())
cbar.set_label("Pixel displacement")
plt.show()
Performance#
for k, v in times.items():
print(f"{k:40}: {v.average:10.4} seconds")
plt.bar(times.keys(), list(map(lambda x : x.average, times.values())))
plt.show()
Optical flow benchmark#
Find optical flow in images with known motion


import imageio
images = []
path = "../datasets/Dimetrodon/frame{}.png"
for f in [10, 11]:
images.append(imageio.imread(path.format(f)))
imageio.mimsave('benchmark_Dimetrodon.gif', images)
from IPython import display
display.Image("benchmark_Dimetrodon.gif")
def benchmark(tf, frames):
from mps_motion import (
block_matching,
dualtvl10,
farneback,
lucas_kanade,
utils,
)
dual_flow = dualtvl10.flow(frames[1], frames[0])
dual_flow_norm = np.linalg.norm(dual_flow, axis=2)
dual_flow_norm /= np.nanmax(dual_flow_norm)
farneback_flow = farneback.flow(
frames[1],
frames[0],
)
farneback_flow_norm = np.linalg.norm(farneback_flow, axis=2)
farneback_flow_norm /= farneback_flow_norm.max()
points = lucas_kanade.get_uniform_reference_points(frames[0], step=4)
lk_flow = lucas_kanade.flow(frames[1], frames[0], points)
lk_flow_norm = np.linalg.norm(lk_flow, axis=2)
lk_flow_norm /= lk_flow_norm.max()
bm_flow = block_matching.flow(frames[0], frames[1], resize=True)
bm_flow_norm = np.linalg.norm(bm_flow, axis=2)
bm_flow_norm /= bm_flow_norm.max()
vmin = 0
vmax = 1.0
fig, ax = plt.subplots(2, 3, figsize=(15, 8), sharex=True, sharey=True)
ax[0, 0].imshow(np.linalg.norm(tf, axis=2), vmin=vmin, vmax=vmax)
ax[0, 0].set_title("True flow")
ax[1, 0].axis("off")
ax[0, 1].imshow(dual_flow_norm, vmin=vmin, vmax=vmax)
ax[0, 1].set_title("dualtvl10")
ax[0, 2].imshow(farneback_flow_norm, vmin=vmin, vmax=vmax)
ax[0, 2].set_title("farneback")
ax[1, 1].imshow(lk_flow_norm, vmin=vmin, vmax=vmax)
ax[1, 1].set_title("lucas kanade")
im = ax[1, 2].imshow(bm_flow_norm, vmin=vmin, vmax=vmax)
ax[1, 2].set_title("block matching")
cbar = fig.colorbar(im, ax=ax.ravel().tolist(), orientation="horizontal")
cbar.set_label("Pixel displacement")
import cv2
import flowiz
folder = Path("../datasets/Dimetrodon")
frames = []
for filename in ["frame10.png", "frame11.png"]:
image = cv2.imread(folder.joinpath(filename).as_posix())
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
frames.append(gray)
flowfile = folder.joinpath("flow10.flo")
true_flow = flowiz.read_flow(flowfile.as_posix())
tf = np.swapaxes(np.array(flowiz.flowiz._normalize_flow(true_flow)).T, 0, 1)
benchmark(tf, frames)
import imageio
images = []
path = "../datasets/RubberWhale/frame{}.png"
for f in [10, 11]:
images.append(imageio.imread(path.format(f)))
imageio.mimsave('benchmark_RubberWhale.gif', images)
from IPython import display
display.Image("benchmark_RubberWhale.gif")
folder = Path("../datasets/RubberWhale")
frames = []
for filename in ["frame10.png", "frame11.png"]:
image = cv2.imread(folder.joinpath(filename).as_posix())
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
frames.append(gray)
flowfile = folder.joinpath("flow10.flo")
true_flow = flowiz.read_flow(flowfile.as_posix())
tf = np.swapaxes(np.array(flowiz.flowiz._normalize_flow(true_flow)).T, 0, 1)
benchmark(tf, frames)
Comparing outputs from the different methods#
from typing import Dict
import numpy as np
from mps_motion import OpticalFlow
scale = 0.3
opt_flows: Dict[str, OpticalFlow] = {}
displacements: Dict[str, np.ndarray] = {}
for k in ["farneback", "lucas_kanade", "block_matching", "dualtvl10"]:
opt_flows[k] = OpticalFlow(data, k)
displacements[k] = opt_flows[k].get_displacements(scale=scale, unit="um")
from mps_motion import Mechancis
mechanics = {}
for k, d in displacements.items():
mechanics[k] = Mechancis(d)
# Create movies
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.animation as animation
for k, m in mechanics.items():
fig, ax = plt.subplots(1, 3, sharex=True, sharey=True)
u = m.u.compute()
u_norm = m.u_norm.compute()
vmin = u.min()
vmax = u.max()
cmap = plt.get_cmap('inferno')
im1 = ax[0].imshow(u[0, :, :,0], cmap=cmap, vmin=vmin, vmax=vmax)
im2 = ax[1].imshow(u[0, : , : ,1], cmap=cmap, vmin=vmin, vmax=vmax)
im3 = ax[2].imshow(u_norm[0, : , :], cmap=cmap, vmin=vmin, vmax=vmax)
ax[0].set_title("X")
ax[1].set_title("Y")
ax[2].set_title("Norm")
cbar = fig.colorbar(im1, ax=ax.ravel().tolist(), orientation='horizontal')
cbar.set_label("Displacement [um]")
def animate_func(i):
im1.set_array(u[i, :, :,0])
im2.set_array(u[i, :, :,1])
im3.set_array(u_norm[i, :, :])
return [im1, im2, im3]
anim = animation.FuncAnimation(fig, animate_func, frames = u.shape[0])
#writer = animation.writers["ffmpeg"](fps=data.framerate)
anim.save(f"disp_{k}.mp4", fps=data.framerate, dpi=300, extra_args=['-vcodec', 'libx264'])
Maximal spatial displacement#
# Create movies
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.animation as animation
fig, axs = plt.subplots(2, 2, figsize=(12, 12))
vmin = 0
vmax = 5
ims = {}
us = {}
cmap = plt.get_cmap('viridis')
for k, m in mechanics.items():
us[k] = m.u_norm.compute()
for (k, u), ax in zip(us.items(), axs.flatten()):
ims[k] = ax.imshow(u[0, :, :], cmap=cmap, vmin=vmin, vmax=vmax)
ax.set_title(" ".join(k.split("_")))
cbar = fig.colorbar(ims[k], ax=axs.ravel().tolist())
cbar.set_label("Displacement [um]")
def animate_func(i):
for u, im in zip(us.values(), ims.values()):
im.set_array(u[i, :, :])
return list(ims.values())
anim = animation.FuncAnimation(fig, animate_func, frames = u.shape[0])
#writer = animation.writers["ffmpeg"](fps=data.framerate)
anim.save(f"disp_norm.mp4", fps=data.framerate, dpi=300, extra_args=['-vcodec', 'libx264'])
from IPython.display import Video
Video(f"disp_norm.mp4", width=800, html_attributes="controls loop")
fig, axs = plt.subplots(2, 2, figsize=(12, 12))
vmin = 0
vmax = 5
for (k, m), ax in zip(mechanics.items(), axs.flatten()):
im = ax.imshow(m.u_norm.max(0).compute())
ax.set_title(" ".join(k.split("_")))
cbar = fig.colorbar(im, ax=axs.ravel().tolist())
cbar.set_label("Displacement [um]")
plt.show()
Average displacement as a function of time#
fig, ax = plt.subplots(figsize=(12, 6))
labels = []
lines = []
for k, m in mechanics.items():
ax.plot(data.time_stamps, m.u_mean_norm.compute(), label=" ".join(k.split("_")))
ax.grid()
ax.legend()
ax.set_xlabel("Time [ms]")
ax.set_ylabel("Displacement norm[\u00B5m]")
plt.show()
How about local variations?#
m = mechanics["farneback"]
from mps.analysis import local_averages
frames = m.u_norm.compute()
la = local_averages(np.rollaxis(np.swapaxes(frames, 0, -1), 1), data.time_stamps, background_correction=False, N=10)
import matplotlib as mpl
from mps import utils
grid = utils.get_grid_settings(N=10, frames=data.frames)
fig, ax = plt.subplots(figsize=(6, 10))
ax.imshow(data.frames.T[0].T)
for i in range(grid.nx):
for j in range(grid.ny):
p = mpl.patches.Rectangle(
(j * grid.dy, i * grid.dx),
grid.dy,
grid.dx,
linewidth=2,
edgecolor="k",
facecolor="yellow",
alpha=0.2,
)
ax.add_patch(p)
plt.show()
fig, ax = plt.subplots(la.shape[0], la.shape[1], sharex=True, sharey=True, figsize=(12, 12))
for i in range(la.shape[0]):
for j in range(la.shape[1]):
ax[i, j].plot(data.time_stamps, la[i, j, :])
plt.show()
max_local_displacement = np.max(la, axis=2)
fig, ax = plt.subplots(figsize=(6, 10))
im = ax.imshow(max_local_displacement)
cbar = fig.colorbar(im)
cbar.set_label("Max displacement [\u00B5m]")
plt.show()
max_idx = np.unravel_index(np.argmax(max_local_displacement),max_local_displacement.shape)
print("Max index = ", max_idx)
fig, ax = plt.subplots(figsize=(10, 6))
ax.plot(data.time_stamps, m.u_mean_norm, label="Global average")
ax.plot(data.time_stamps, la[max_idx[0], max_idx[1], :], label="Max index")
ax.legend(bbox_to_anchor=(1, 1), loc='upper left')
ax.set_ylabel("Displacement norm [\u00B5m]")
plt.show()
How about resizing?#
import matplotlib.pyplot as plt
from mps_motion import OpticalFlow, Mechancis
opt_flow = OpticalFlow(data, "farneback")
fig, ax = plt.subplots(figsize=(12, 6))
for scale in [1, 0.7, 0.5, 0.3, 0.1]:
d = opt_flow.get_displacements(scale=scale, unit="um")
m = Mechancis(d)
ax.plot(data.time_stamps, m.u_mean_norm.compute(), label=f"{scale:.2f}")
ax.grid()
ax.legend()
plt.show()
Next steps#
Test method on real data - do we observe expected changes when exposed to drugs?
Implement GUI in Web application
Other potential directions#
Try more modern methods for motion tracking - based on deep learning
Train neural network (NN) to learn the motion (from pixels)
Use Pysics Informed- or Physics Guided NN