Release test#
The release test is a test to make sure that the coupling between the mechanics and the electrophysiology is implemented correctly.
The idea is to apply a rapid length reduction of 1-2% during the middle o the activation. If the coupling is implemented correctly, this would make the active force \(T_a\) drop to zero. If the coupling is not implemented correctly, the solver will most likely fail.
We can simulate a rapid length reduction by fixing one side of the slab, and control the position of the opposite side through a varying dirichlet boundary condition, i.e
where \(\mathbf{u}\) is the displacement fields, \(\Gamma_0\) is the fixed boundary and \(\Gamma_1\) is the boundary where we apply a rapid length reduction. In this case we set the value of the boundary to be a time dependent function
In other words, we pre-stretch the slap with a 10% stretch in the beginning, and when \(t \geq T^*\) we change this value to be some value that depends on the length of the slab.
First we make the necessary imports
import logging
from pathlib import Path
import dolfin
import pulse
import simcardems
And we also turn off logging from pulse in order to not flow the output
pulse.set_log_level(logging.WARNING)
Next we create a new Runner by subclassing the simcardems.Runner class.
We also make this runner take in an argument T_release that will be the the time when we trigger the rapid length reduction. We also store the pre-stretch variable which is the variable we will change when applying the rapid length reduction.
Also, we can only do this on a slab type geometry so we add an extra test for that.
class ReleaseRunner(simcardems.Runner):
def __init__(self, config, T_release):
self._T_release = T_release
self.pre_stretch = config.pre_stretch
assert self.pre_stretch is not None
super().__init__(config=config)
# Make sure we have a SlabGeometry
assert isinstance(self.coupling.geometry, simcardems.slabgeometry.SlabGeometry)
self.Lx = self.coupling.geometry.parameters["lx"]
self._print_message = True
def _post_mechanics_solve(self) -> None:
# Convert internal time for nanoseconds to milliseconds
# And apply release when time is greater then T release
if simcardems.TimeStepper.ns2ms(self.t) >= self._T_release:
if self._print_message:
# Make sure message is only printed once
print("Release")
self._print_message = False
pulse.iterate.iterate(
self.coupling.mech_solver,
self.pre_stretch,
-0.02 * self.Lx,
)
return super()._post_mechanics_solve()
The rapid length reduction is implemented as a part of the _post_mechanics_solve method which is an internal method of the Runner class that is called after the mechanics system is solved. Note that we also call the _post_mechanics_solve method of the parent class at the end (through super).
Now we can set up the main function
def main(config: simcardems.Config):
# Apply release half way through
T_release = config.T // 2
runner = ReleaseRunner(config=config, T_release=T_release)
runner.solve(T=config.T)
and a function for plotting the traces
def postprocess(outdir: Path):
simcardems.postprocess.plot_state_traces(outdir.joinpath("results.h5"))
if __name__ == "__main__":
# Get path to this file
here = Path(__file__).absolute().parent
outdir = here / "release_test_results"
geometry_path = here / "geometries/slab.h5"
geometry_schema_path = here / "geometries/slab.json"
config = simcardems.Config(
outdir=outdir,
T=200,
pre_stretch=dolfin.Constant(0.1),
geometry_path=geometry_path,
geometry_schema_path=geometry_schema_path,
)
main(config=config)
postprocess(outdir=outdir)
In Figure 3 we see the resulting state traces from the center of the slab, and can also see the instant drop in the active tension (\(T_a\)) at the time of the triggered release.
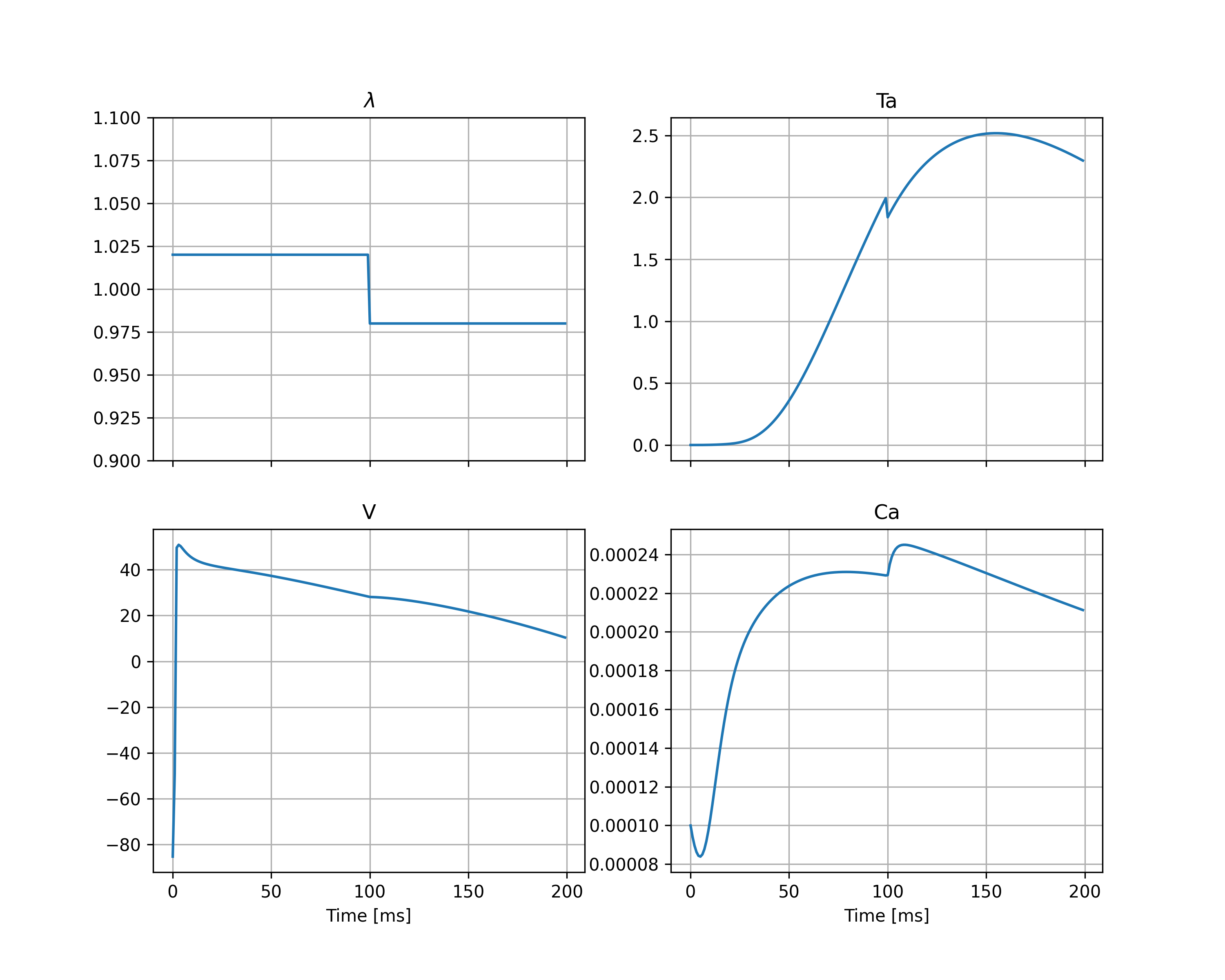
Fig. 3 Traces of the stretch (\(\lambda\)), the active tension (\(T_a\)), the membrane potential (\(V\)) and the intercellular calcium concentration (\(Ca\)) at the center of the geometry.#
In Figure 4 we also plot some of the other mechanical traces from the underlying ODE model
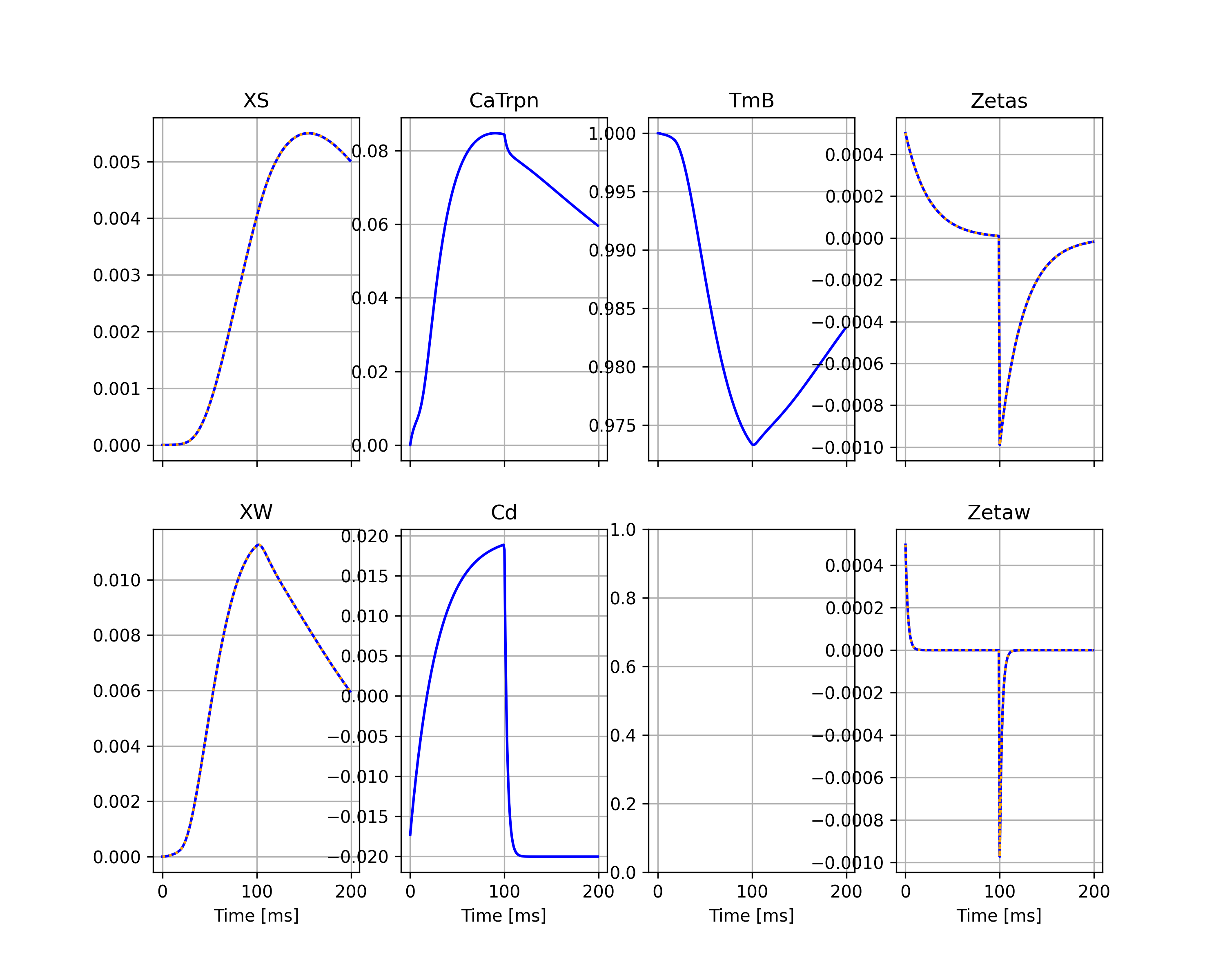
Fig. 4 Traces of some of the mechanics states in the ODE model#